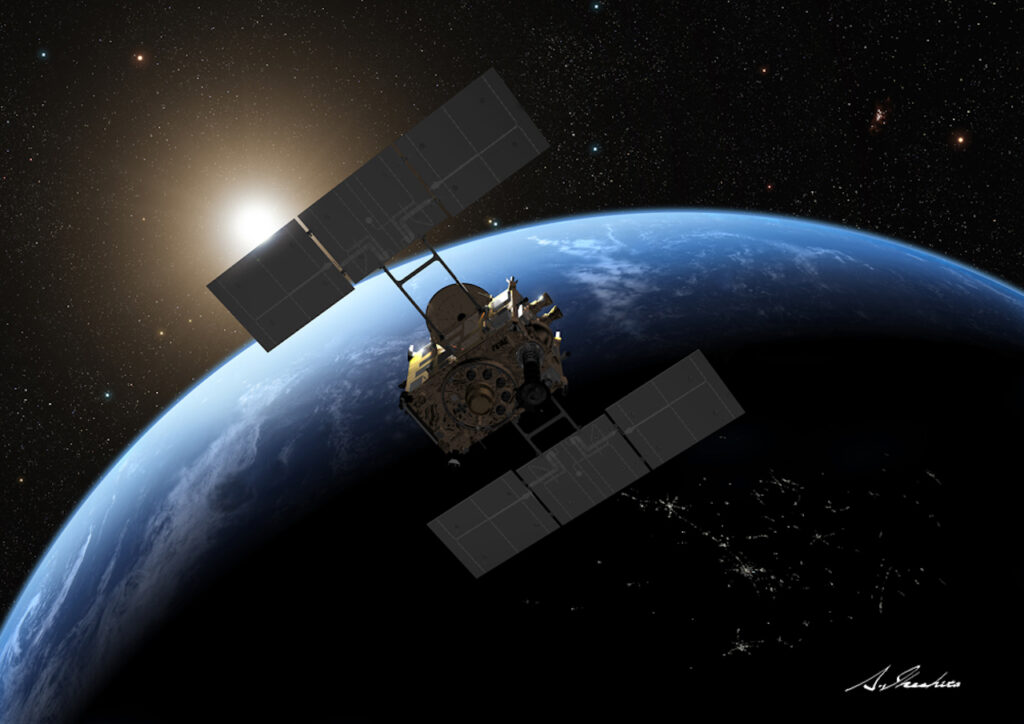
打ち上げ
2014年12月3日

種子島宇宙センターから、「はやぶさ2」を載せたH-IIAロケット26号機が打ち上げられた。
地球スイングバイ
2015年12月3日
打ち上げられた「はやぶさ2」は、地球の軌道に近い軌道を1年間回る。
そして再び地球に近づき、地球の引力を利用して軌道を飛び出し(地球スイングバイ)、小惑星「リュウグウ」へ向かった。
小惑星「リュウグウ」到着
2018年6月27日
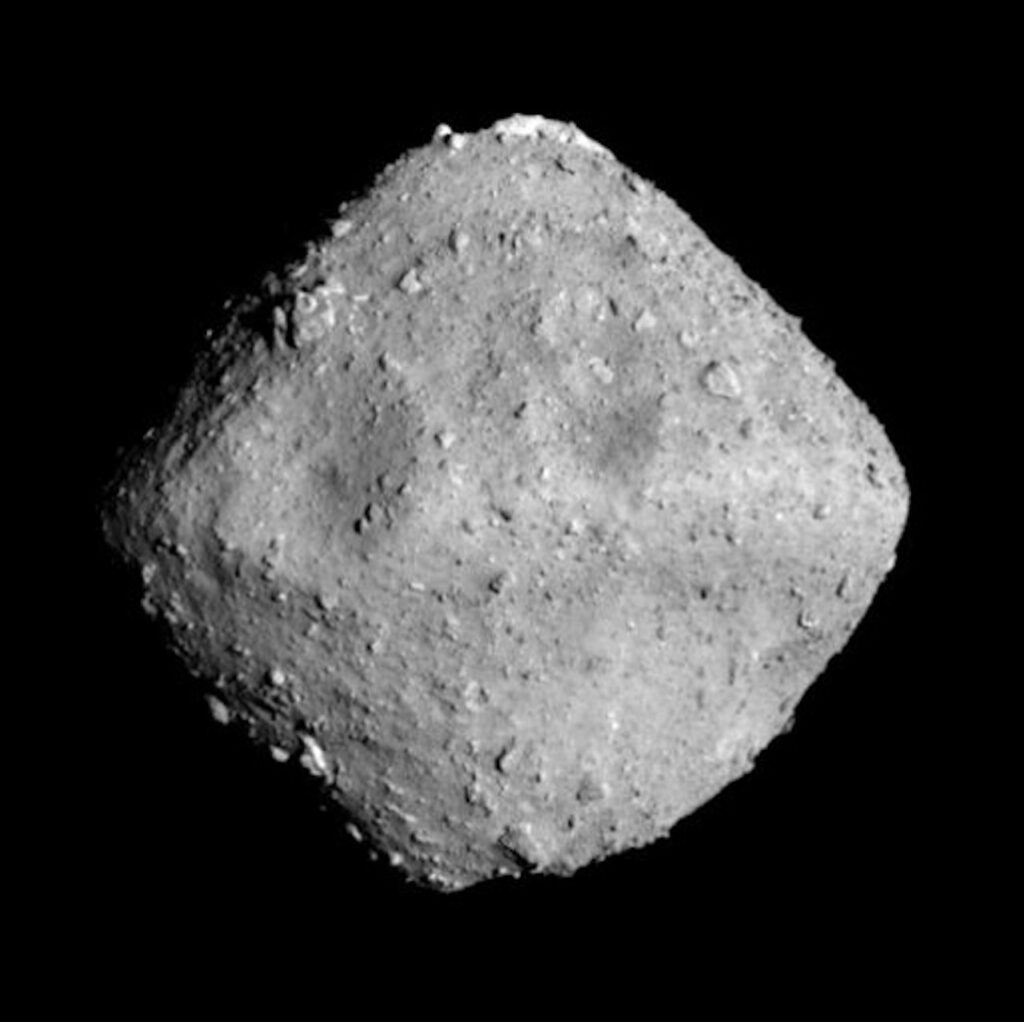
到着すると、「リュウグウ」はそろばんの珠のような形のコマ型の小惑星だった。
MINERVA-Ⅱ ローバ1A, 1B分離(小型探査ロボット ミネルバ2)
2018年9月21日
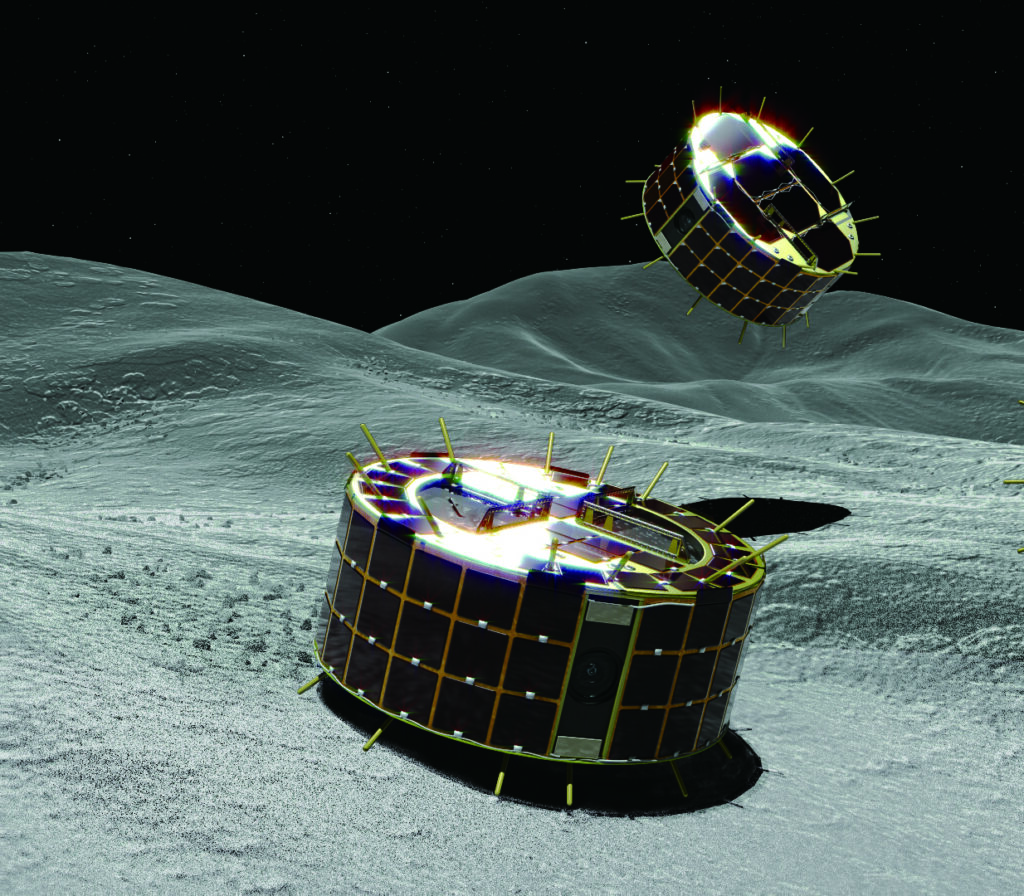
MINERVA-Ⅱ ローバ1A, 1Bを「リュウグウ」へ放つ。MINERVA-Ⅱ ローバ1A, 1Bは、直径18cm×高さ7cmの円柱形で、重さ1.1kgの小型探査ロボット。表面で自律的にはねながら移動し、写真撮影を行った。
小惑星の表面に降りた世界初の小型探査ロボットとなる。(2機同時に動作)
MASCOT分離(小型着陸機 マスコット)
2018年10月3日
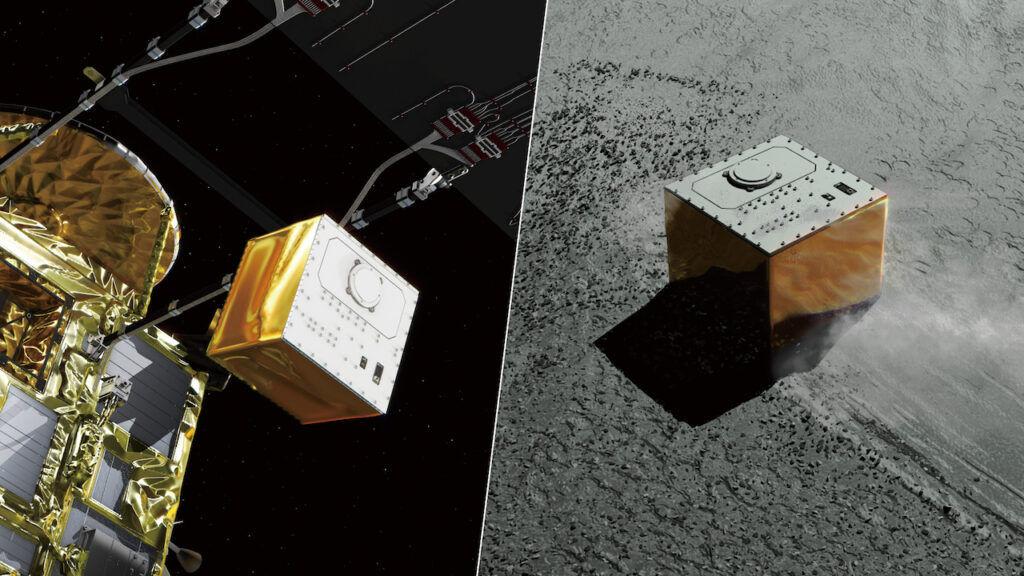
分光顕微鏡や広角カメラなどを積んだMASCOTを「リュウグウ」へ放ち、リュウグウ表面を詳細に観測し、鉱物の組成(成分)などを調べる。
MASCOTは、0.3×0.3×0.2mの直方体、約10kg。ドイツ・フランスが開発し、「はやぶさ2」で初めて使用された小型着陸機。表面温度を測る熱放射計 (MARA) や、磁場を測定する磁力計 (MASMAG) も積んでいる。
ターゲットマーカ分離
2018年10月25日

タッチダウンへ向けた3回目のリハーサルで、ターゲットマーカ1個を「リュウグウ」に放った。
ターゲットマーカは、反射シートで覆われた直径約10cmの球体で、探査機からのフラッシュによって反射シートが明るく輝き、タッチダウン(着陸)を助ける灯台の役割をする。
第1回タッチダウン
2019年2月22日
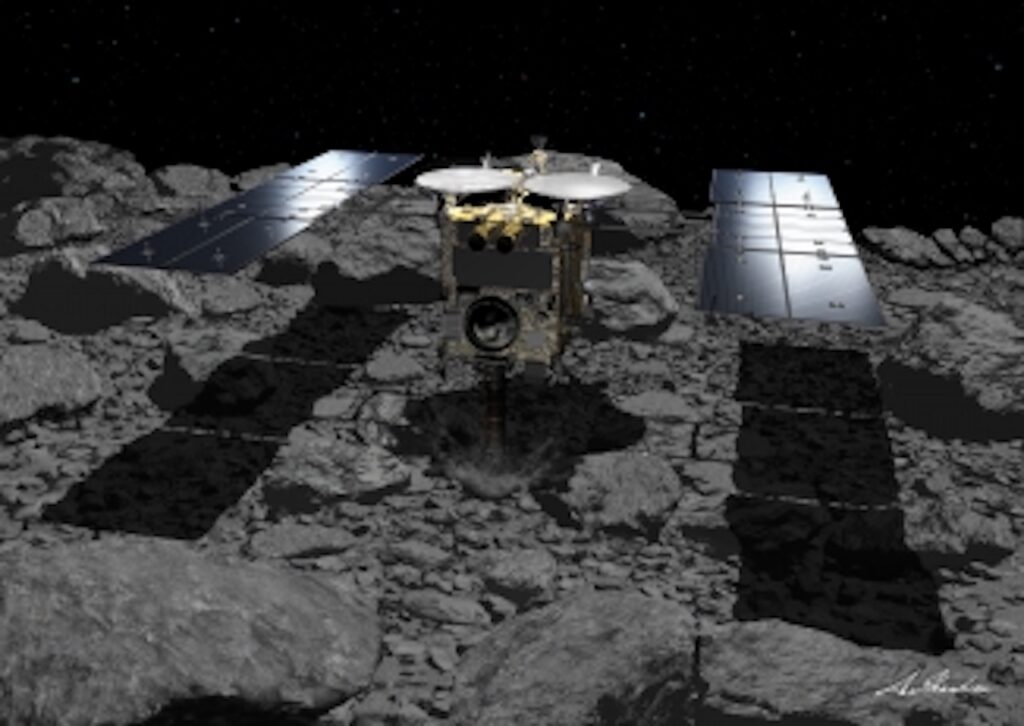
タッチダウン(着陸)を行う。プロジェクタイル(弾丸)を発射して表面をくだき、「リュウグウ」のサンプルを採取した。着陸精度の誤差は1mだった。
当初タッチダウンは、2018年10月末の予定だったが、表面が思ったよりデコボコしていたので4か月延期した。
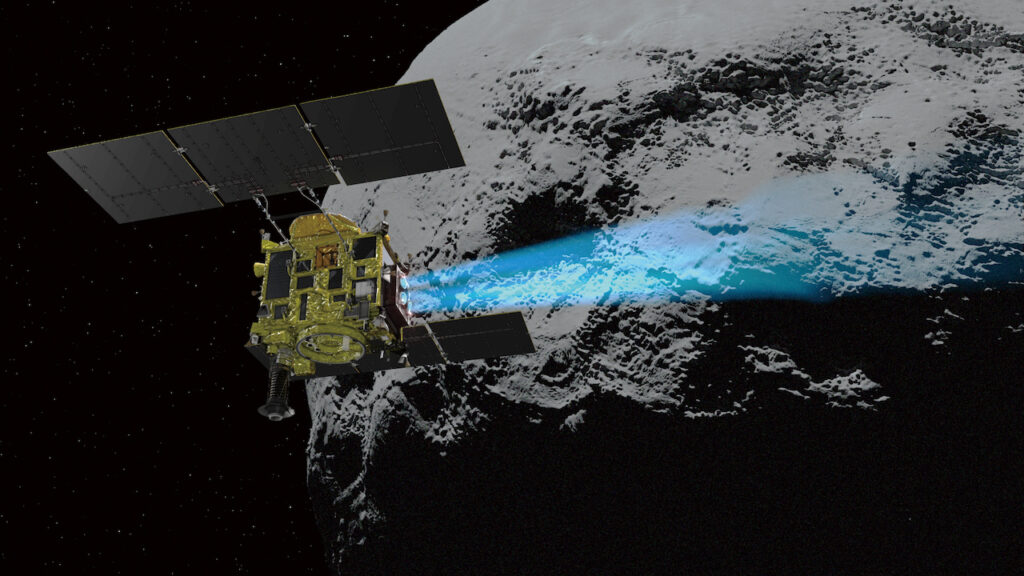
衝突装置によって人工クレーター生成
2019年4月5日

衝突装置を「リュウグウ」に放つ。衝突装置は、爆発すると銅のかたまりを発射し、「リュウグウ」にクレーターを作った。「はやぶさ2」は衝突装置を分離後、装置が爆発するまでの40分間に、「リュウグウ」の裏側の安全な場所に移動した。移動の途中で分離カメラを放出し、衝突のようすを撮影した。
ターゲットマーカ分離
2019年5月30日
第2回タッチダウンのため、高度9m付近でターゲットマーカを分離。タッチダウンの目標地点内に、ターゲットマーカを降ろすことができた。
第2回タッチダウン
2019年7月11日
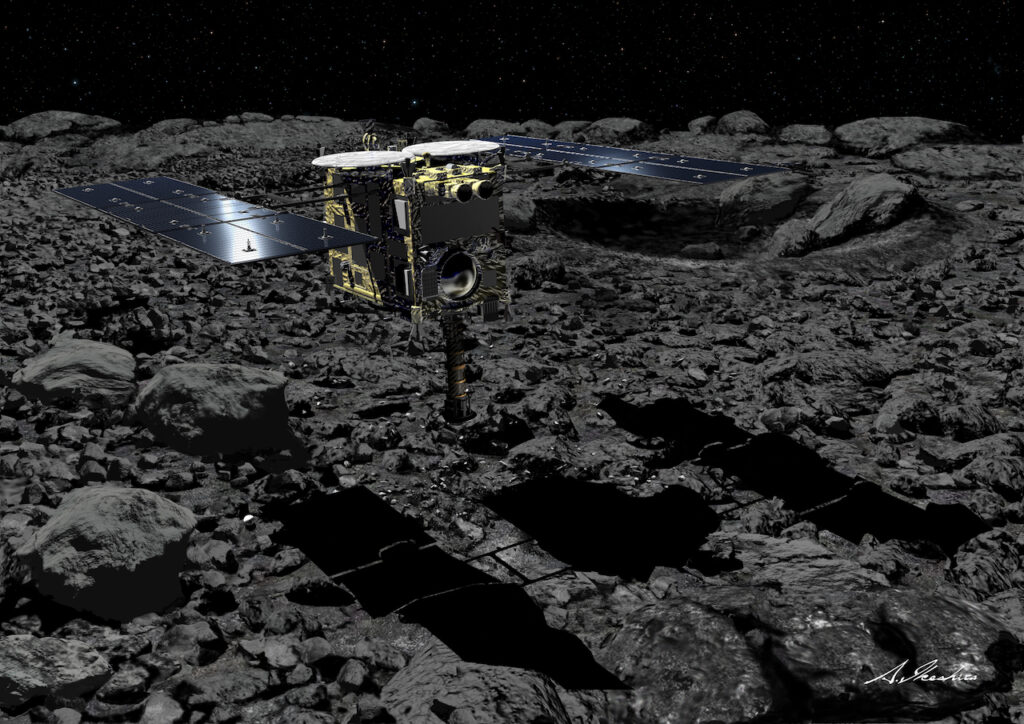
クレーター付近へタッチダウン。1回目のタッチダウンの時のようなトラブルもなく、順調に「リュウグウ」のサンプルの採取を行う。着陸精度、誤差60cm(世界最高精度)でのタッチダウンを実現できた。
ターゲットマーカ分離
2019年9月17日
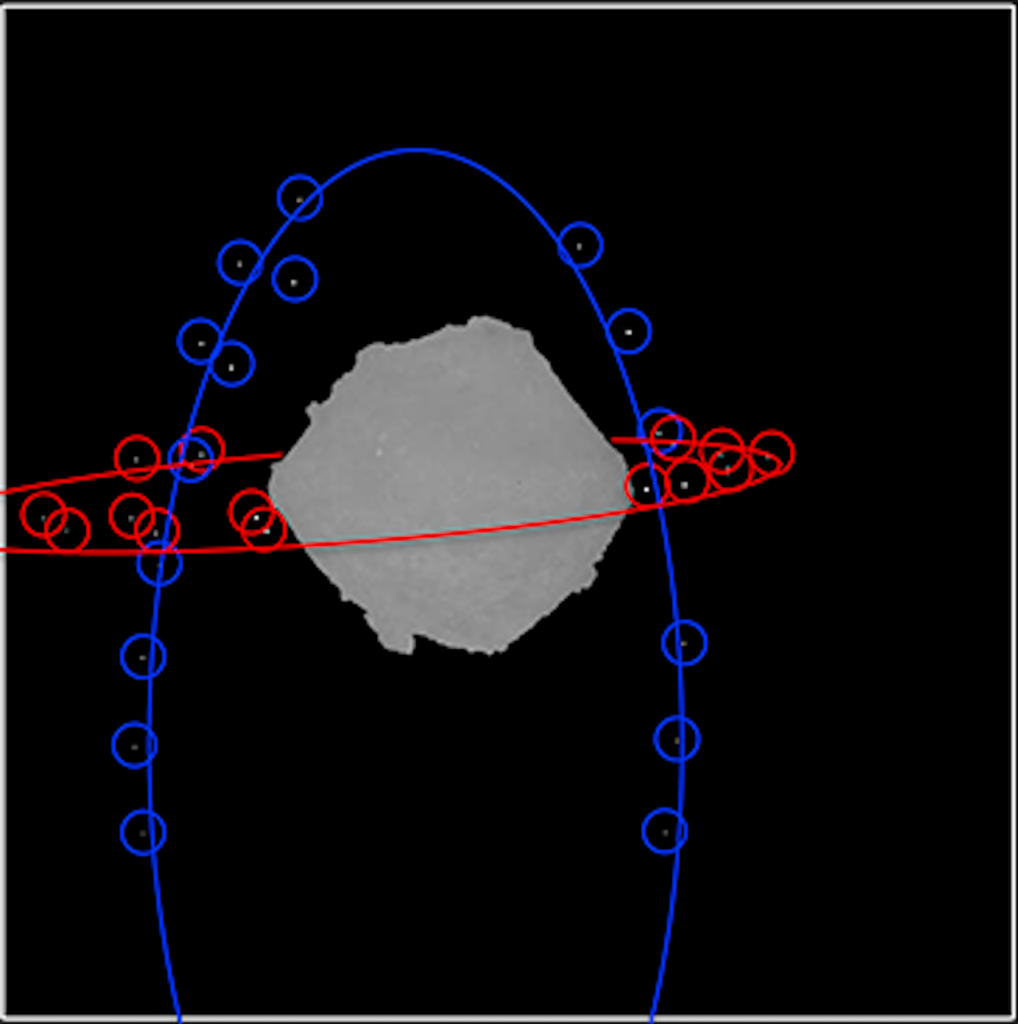
MINERVA-Ⅱ ローバ2に不具合があり、投下してもデータを取得できない可能性が高かったので、「リュウグウ」を回る人工衛星にすることになった。
まず試しに、残っていたターゲットマーカ3個のうちの2個を分離し、赤道周回の軌道(図の赤線)と、極周回の軌道(図の青線)に放った。
MINERVA-Ⅱ 2分離
2019年10月3日

MINERVA-Ⅱ ローバ2を分離し、「リュウグウ」の軌道にのせることに成功。探査機からの撮影や通信なども問題なかった。
世界で初めて小惑星の回りに3個の人工衛星を周回させたことになる。
写真は、「はやぶさ2」から分離された「MINERVA-Ⅱ ローバ2」の連続画像。
「リュウグウ」出発
2019年11月13日
「リュウグウ」から出発し、地球に向かう軌道に乗った。
カプセル地球帰還
2020年12月6日

(カプセルの写真:右・再突入前、中央・再突入後の前面ヒートシールド、左・再突入後の背面ヒートシールド)
2020年12月5日、カプセルは探査機から分離され、約12時間後の12月6日の未明にオーストラリアのウーメラ砂漠に着地した。
「はやぶさ2」は、延長ミッションとして別の小惑星(1998 KY26)へ向かった。






